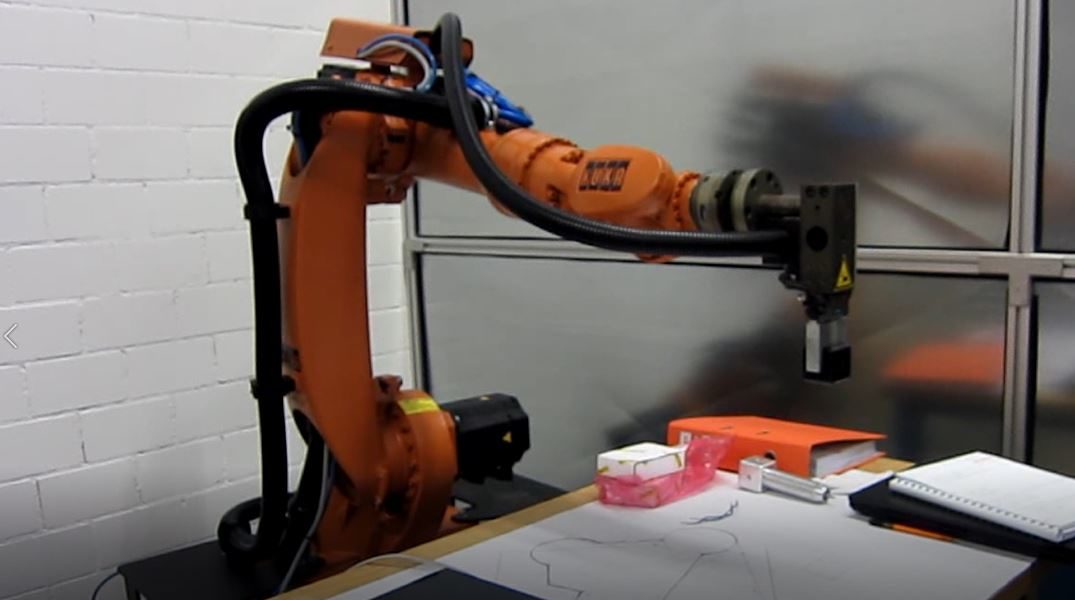
Evaluation of trajectory accuracy and max speed of the robot arm by drawing and placing component.
Comments are Closed
Comments are Closed